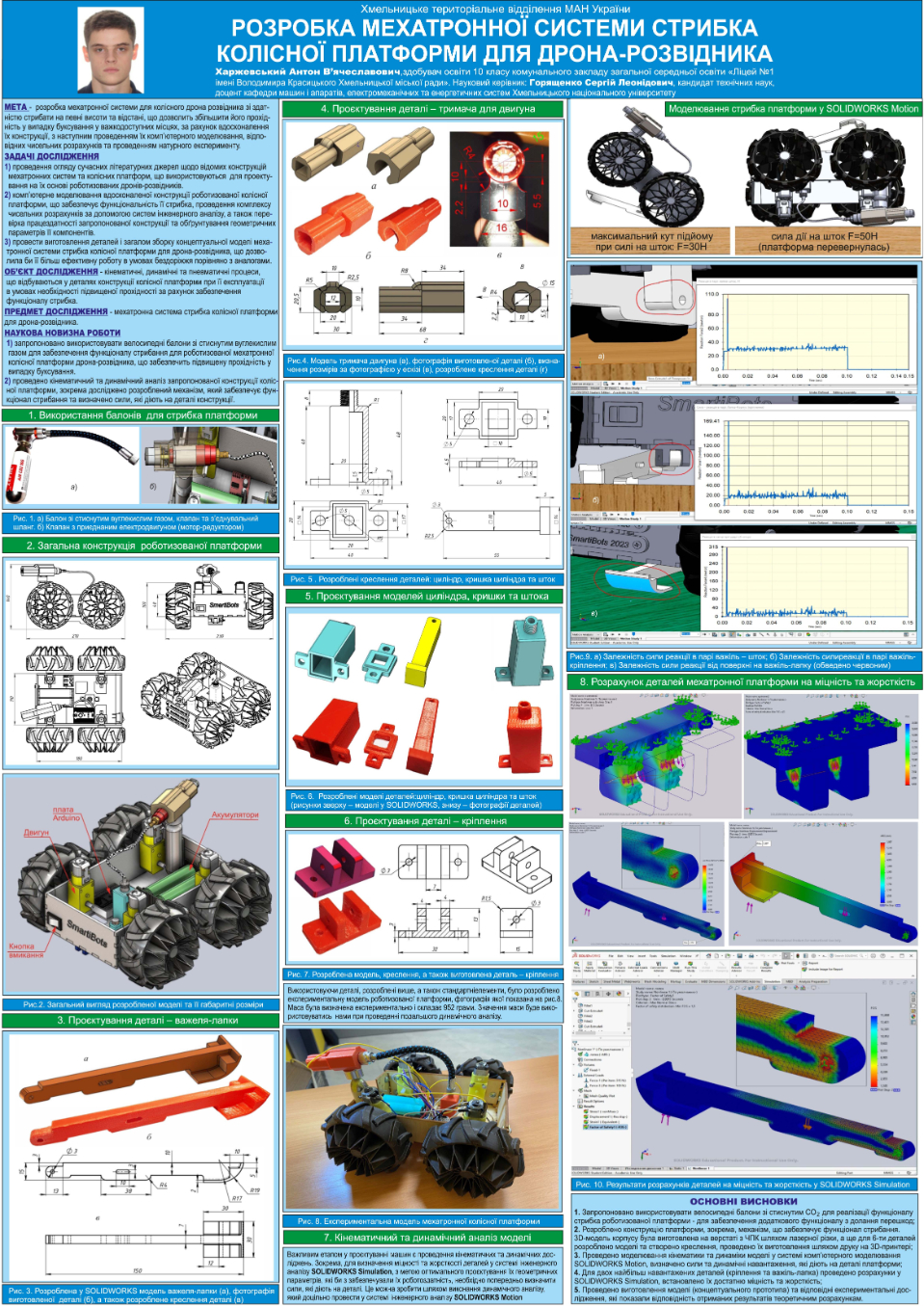
Розробка мехатронної системи стрибка колісної платформи для дрона-розвідника
Навчальний заклад: Комунальний заклад загальної середньої освіти «Ліцей №1 імені Володимира Красицького Хмельницької міської ради»
Автор: Харжевський Антон В'ячеславович
Відділення: Інженерія та матеріалознавство
Секція: Автоматизація та робототехніка
Область: Хмельницька
Опис:
В сучасних умовах проєктування мобільних роботизованих платформ є важливою та актуальною задачею, що має подвійне призначення – як цивільне, так і військове. При цьому забезпечення можливості стрибати на певні висоти відіграє важливу роль для прохідності такої платформи, оскільки тоді вона має змогу рухатись у важкодоступних місцях, в тому числі по території, тимчасово зайнятій ворогом. Це дозволяє знизити ризик для людей та підвищити ефективність розвідувальних операцій. Проєктування такої мехатронної колісної платформи і є метою даної роботи. Основне завдання полягало у розробці та дослідженні механізму, що забезпечує функціонал стрибання, для чого необхідно було визначити сили, що діють на його деталі. Вперше запропоновано використовувати в конструкції платформи балон зі стиснутим вуглекислим газом, що зазвичай використовується для накачування велосипедних шин, що приводить у рух поршень, кінематично зв’язаний з важелем, який відштовхує платформу від поверхні. Проведено 3D-моделювання, а також розрахунок кінематичних та динамічних параметрів платформи. Для двох найбільш навантажених деталей (кріплення та важіль-лапка) проведено розрахунки на міцність та жорсткість, з використанням числових методів. Експериментальні дослідження виготовленої концептуальної моделі колісної платформи показали правильність проведених розрахунків та працездатність запропонованої конструкції.