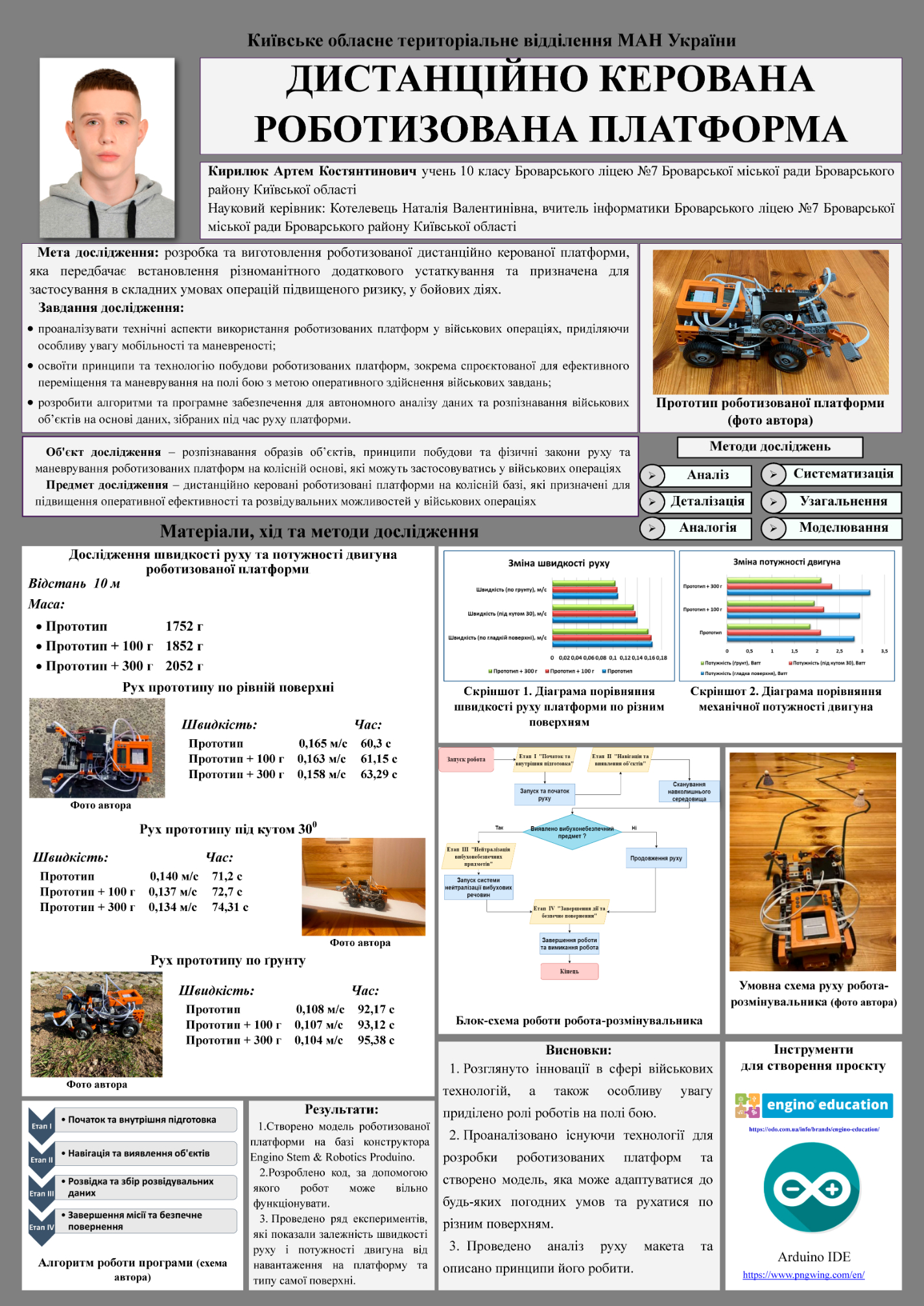
Дистанційно керована роботизована платформа
Навчальний заклад: Броварський ліцей №7 Броварської міської ради Броварського району Київської області
Автор: Кирилюк Артем Костянтинович
Відділення: Інженерія та матеріалознавство
Секція: Автоматизація та робототехніка
Область: Київська
Опис:
Дослідницьку роботу присвячено розробці та детальному опису роботи макета роботизованої платформи. У роботі розглянуто інновації в сфері військових технологій, а також особливу увагу приділено ролі роботів у виявленні вибухонебезпечних предметів. Проаналізовано існуючі технології для розробки роботизованих платформ. Розроблено програмне забезпечення для аналізу даних і розпізнавання об’єктів із використанням мови С++. В роботі детально описано складову роботизованої платформи: його електронні компоненти. Створено прототип роботизованої платформи, який працює за визначеним алгоритмом. Під час дослідження було проведено ряд експериментів для вимірювання швидкості платформи на різних типах поверхонь, а також під кутом 30 градусів. Були використані різні методи для точного визначення швидкості платформи, проводячи досліди на землі та на гладких поверхнях. Отримані результати дали можливість визначити вплив різних типів поверхонь на швидкість і продуктивність платформи. Було розраховано потужність, необхідну для забезпечення ефективності роботизованої системи. Дослідження мають велике значення для розвитку військової техніки, оскільки дають важливу інформацію про роботу роботизованих платформ у реальних умовах та сприяють подальшому розвитку та вдосконаленню військової техніки.